
仕事で、CANモニタが欲しいんだけど、数万円と高いよね。
ただCAN信号を見たいだけなので、そんなすごい機能は要らないよ。
M5StackとCOMMUモジュールを使えば、
安価で、持ち運びが楽なCANモニターが作れるよ。
今回は、M5StackでCANモニタを作る方法を紹介します。
CANとは
CANは、「Controller Area Network」の略で、ドイツのBosch社が開発したシリアル通信プロトコルです。CANは、ほぼすべての車両に使われているほど自動車の車内LANとして普及している通信規格です。また、工場の自動化(FA:ファクトリーオートメーション)など幅広い分野で活用されています。
現在の自動車は、複数のECUが連携することで、ADAS(先進運転支援システム)など高度なシステムを構築しています。
そのため、自動車開発においては、CANに流れる信号が設計通り流れているか、異常なタイミングや信号値が送信されていないかをモニターして評価することが重要です。
CANモニターは、様々なメーカから販売されていますが、複数バスを同時にモニターできる、任意の信号を送信できるなど、自動車開発に必要な多くの機能が入っているため、かなり高価となりますし、一般的にはPCとセットで使われるため、荷物が多くなり準備にも時間がかかります。
そこで、安価で、持ち運びが楽なCANモニターをM5Stackで作りたいと思います。
この記事で解決できること
・M5StackでCANモニターが作れます。
・COMMUモジュールの使い方(CANの受信処理)がわかります。
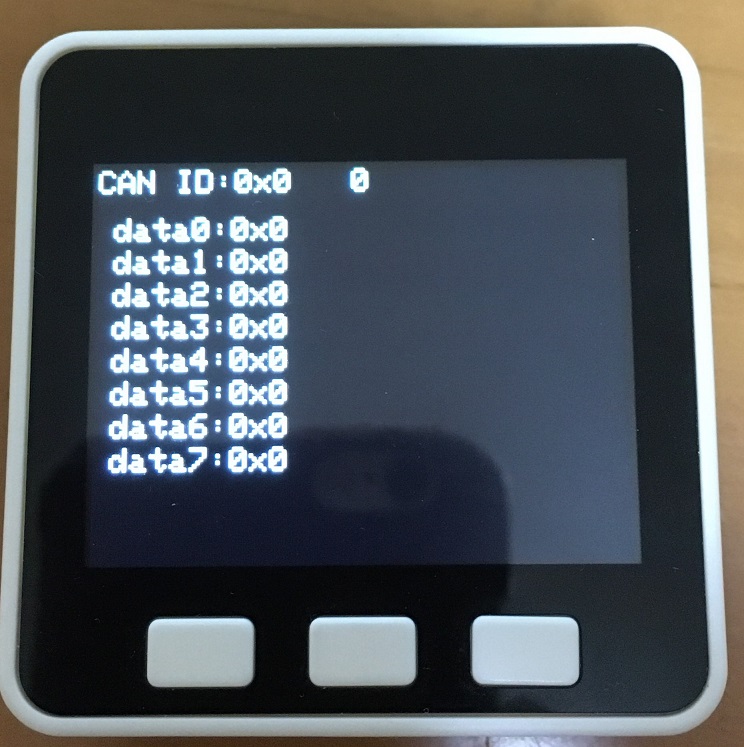
今回作成するアプリ
受信したCANデータをCAN ID毎に画面を分けて表示させます。
ボタンA、Cを押すことで、CAN IDを切り替えます。

準備
・M5Stack
・COMMUモジュール
・PCに、ArduinoIDEがインストール済み
COMMUモジュールについては、以下で説明していますので、参考にしてください。

構成
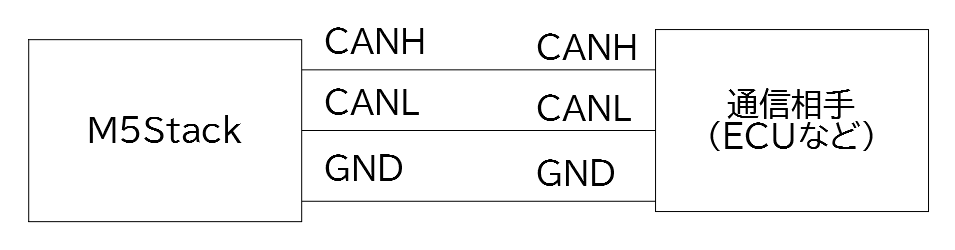
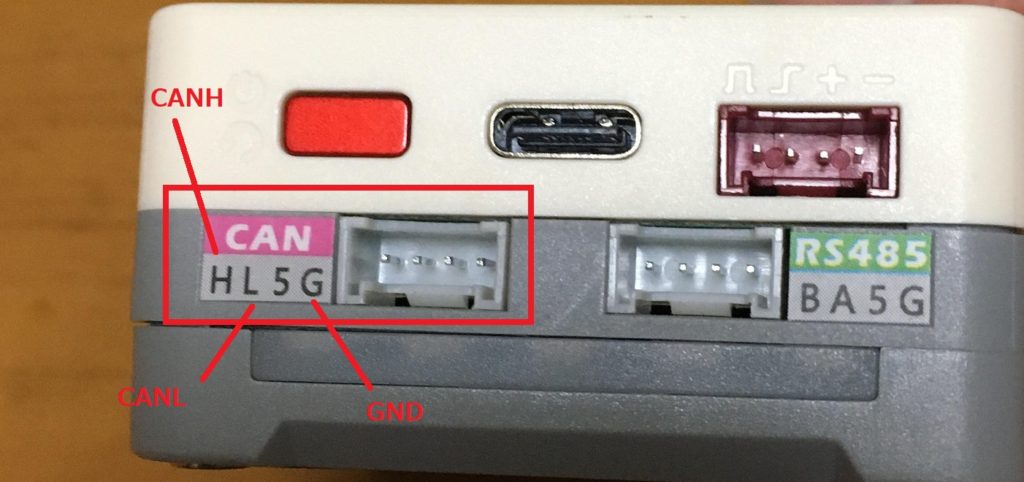
M5Stack(COMMUモジュール)のCANポートについて
下の写真のCANH、CANL、GNDを、通信相手のCANH、CANL、GNDにつないでください。
ライブラリのインストール
COMMUモジュールを使用するには、MCP_CAN_libというライブラリを、ArduinoIDEにインストールする必要があります。
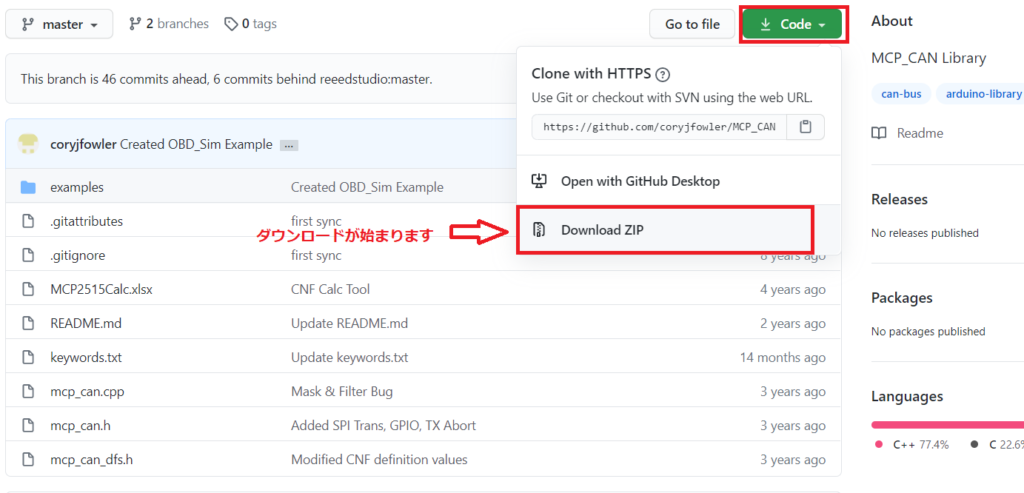
①「MCP_CAN_lib」をダウンロードする
公式サイトから、MCP_CAN_lib-master.zipをダウンロードしてください。
②ArduinoIDEにインストールする
ArduinoIDEを起動して、「スケッチ」-「ライブラリをインクルード」-「ZIP形式のライブラリをインストール」を選択
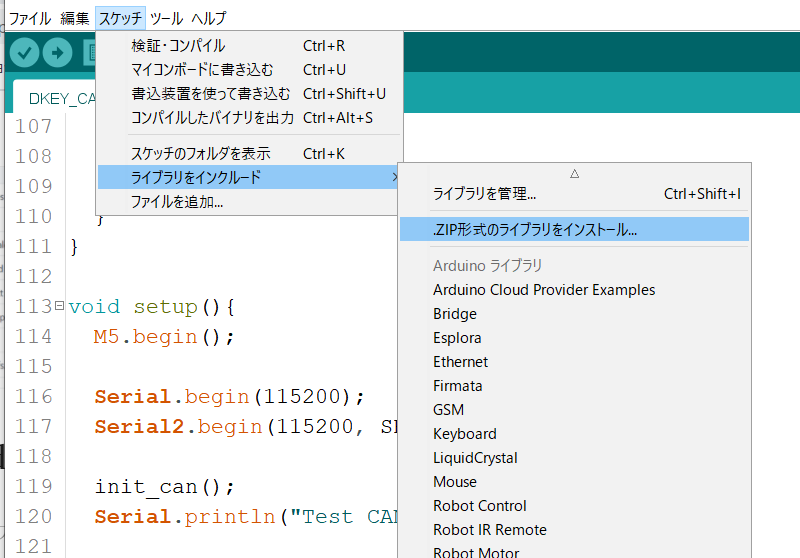
先ほどダウンロードしたファイルを選択すれば、インストールされます。
サンプルコード
ArduinoIDEを立ち上げて、以下のサンプルコードをコピーしてください。
#include <M5Stack.h>
#include <mcp_can.h>
#define CAN0_INT 15 // Set INT to pin 2
MCP_CAN CAN0(12); // Set CS to pin 10
// 受信したいCAN ID個数を設定する(ボタンを押す毎にスクロールする画面数になる)
#define BUF_NUM 50
// CAN情報
class CANData{
public:
long unsigned int canId;
unsigned char len;
unsigned char datas[8];
};
static CANData rcv_data[BUF_NUM];
static int display_number = 0;
// CANモジュールの初期化
void init_can(){
M5.Lcd.setTextSize(2);
M5.Lcd.setCursor(0, 10);
M5.Lcd.fillScreen(0x0000);
// MCP2515の初期化に成功した場合(ビットレート500kb/s )
if(CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) == CAN_OK){
// 特になにもしない
}else{ // 初期化に失敗した場合
// 特になにもしない
}
// MCP2515を通常モードに設定
CAN0.setMode(MCP_NORMAL);
// CAN0_INTを入力ピンに設定(受信用)
pinMode(CAN0_INT, INPUT);
}
// CAN通信データを受信
void receiveData(){
long unsigned int temp_canId;
unsigned char temp_len = 0;
unsigned char temp_datas[8];
byte i;
int flag = 0;
// CAN0_INTピンがLowなら、受信したバッファを読み込む
if(!digitalRead(CAN0_INT)){
// 受信データの取得
CAN0.readMsgBuf(&temp_canId, &temp_len, temp_datas);
// バッファに格納する。受信済みのCAN IDがあれば上書きする
for(i = 0;i < BUF_NUM; i++){
if(temp_canId == rcv_data[i].canId){
flag = 1;
break;
}else if(rcv_data[i].canId == 0x0000){
flag = 1;
break;
}else{
// なにもしない
}
}
// 受信データを格納用バッファへコピー
if(flag == 1){
flag = 0;
rcv_data[i].canId = temp_canId;
rcv_data[i].len = temp_len;
for(byte j = 0; j < rcv_data[i].len; j++){
rcv_data[i].datas[j] = temp_datas[j];
}
}
}
}
// 画面表示
void display_data(){
String data = "None";
byte i;
// ボタンAを押す度に、バッファナンバーをマイナス側に変える
if(M5.BtnA.wasPressed()){
if(display_number == 0){
display_number = (BUF_NUM - 1);
}else{
display_number--;
}
M5.Lcd.fillScreen(0x0000);
}
// ボタンCを押す度に、バッファナンバーをプラス側に変える
if(M5.BtnC.wasPressed()){
display_number++;
if(display_number >= BUF_NUM){
display_number = 0;
}
M5.Lcd.fillScreen(0x0000);
}
i = display_number;
// CAN IDを表示
M5.Lcd.drawString("CAN ID:0x" + String(rcv_data[i].canId, HEX)+" " + String(i),0,0);
// データ(8byte)を表示
for(byte j = 0; j < rcv_data[i].len; j++){
data = String(rcv_data[i].datas[j], HEX);
M5.Lcd.drawString("data" + String(j) + ":0x" + data + " ", 10, j*20 + 30);
}
}
void setup() {
M5.begin();
Serial.begin(115200);
Serial2.begin(115200, SERIAL_8N1, 16, 17);
delay(500);
M5.Lcd.setTextSize(2);
init_can();
// バッファをクリアしておく
for(byte i = 0; i < BUF_NUM ; i++){
rcv_data[i].canId = 0x00;
rcv_data[i].len = 0x08;
for(byte j = 0; j < rcv_data[i].len; j++){
rcv_data[i].datas[j] = 0x00;
}
}
}
void loop() {
receiveData();
display_data();
M5.update();
}動かし方
ArduinoIDEでコンパイルしてダウンロードが完了すると、CAN待ち受け状態となります。
ここで、CAN通信が開始されると、M5Stackは、受信データを画面に表示します。
ボタンCを押すと、次に受信したCAN IDが表示されます。

ボタンAを押すと、元の画面に戻ります。
まとめ
今回は、M5StackとCOMMUモジュールを使った、CANモニターを紹介しました。
AI(人工知能)特化型プログラミングスクール「Aidemy Premium」
Aidemy Premiumは、AIや機械学習などの最先端技術の修得に留まらず、それらを活用して目標達成を実現するまでを一気通貫して支援するオンラインコーチングサービスです。
こんな思いを持っている人にオススメ
・AIエンジニア/データサイエンティストにキャリアチェンジしたい
・業務課題(研究課題)をAIを使って解決したい
・教養としてAIについて知りたい
・AIに関してのスキルを身に着け就職活動に活かしたい…
オススメポイント
・3ヶ月間集中して「AIプログラミング」を修得するオンラインコーチングサービスです。
・完全なプログラミング初心者から研究者にまで幅広く優良なコンテンツを提供します。
・通常のプログラミングスクールとは異なり、受講者の進捗管理を徹底して行います。
・専属メンターがAIの学び方から徹底的にコーチングします。
・完全オンライン完結なので、東京以外に在住・在勤の方も気兼ねなくお申込み頂けます。
実績
・日本最大級のAI/人工知能プログラミングスクール
・SaaS型AI学習サービス「Aidemy」会員登録者数 55,000名突破
・法人向けAI内製化支援サービス「Aidemy Business」導入企業数 120社突破
・第16回 日本e-Learning大賞「AI・人工知能特別部門賞」受賞
・「HRアワード2019」プロフェッショナル部門 入賞
無料ビデオカウンセリング実施中です。






コメント