プログラミングをもっと楽しみたい。何かないかな。
M5StackシリーズのM5Stickで動かすロボットがあります。
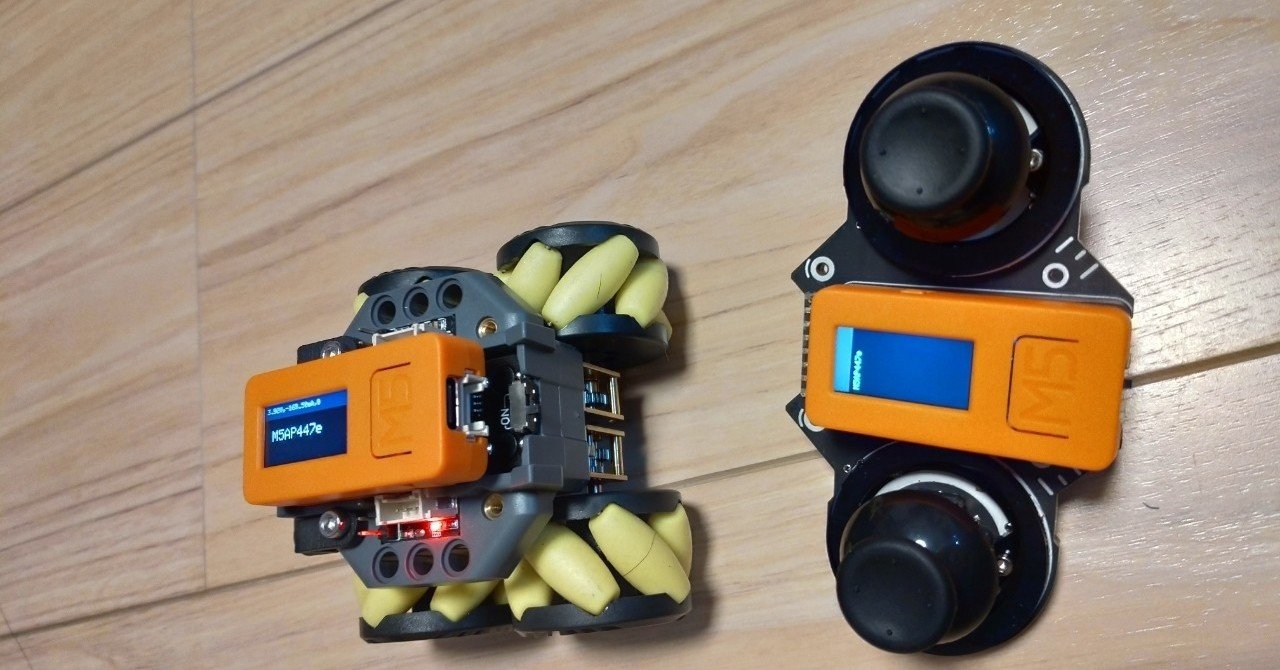
今回は、M5Stickで動かすロボット「RoverC-Pro」を紹介します。
RoverC-Proとは

RoverC-Proは、プログラム可能なMecanumホイール全方向移動ロボットベースです。M5StickC / M5StickC PLUSと互換性があり、M5StickC / M5StickCPLUSを挿入するだけで初期化できます。メインコントロールチップはSTM32F030C6T6で、4つのN20ウォームギアモーターが組み込まれており、モータードライバーによって直接ホイールを駆動します。
PROバージョンは、オブジェクトを把持するためのサーボによって制御される把持メカニズムを提供します。ベースは2つの専用サーボ制御ドライバーを提供します。さらに、他のモジュールの拡張を容易にするために、2つのGrove互換I2Cコネクタも提供します。ベースはレゴと互換性があり、構造的に拡張することができます。背面には16340(700mAh)のバッテリーがあり、そこからバッテリーを交換できます。M5StickC / M5StickCPLUSを介して再充電できます。ベースの電力は、独立したスイッチによって制御されます。
M5Stackドキュメント
公式サイト
Roverを知るには、まずは公式サイトです。
公式サイト

M5Stack社提供のサンプルソース(GitHub)

販売サイト
販売サイトには、Roverの説明に加え、購入後に必要となる情報が載っています。
スイッチサイエンス
M5Stackといえば、スイッチサイエンスが浮かんでくるほど、有名な販売サイトです。

紹介サイト
マルツ 新商品紹介情報
M5StickCを接続して使用する3種類のロボットベース「BugC」「PuppyC」「RoverC」の紹介記事です。

YouTube
M5stack RoverC
RoverCが動いているところが見られます。
M5Stack Connecting the RoverC to the JoyC
JoyCでRoverCを操作している様子です。
M5Stack RoverC: Mecanum Wheel Robot with Bluetooth
BluetoothでRoverCを動かしている様子。
技術記事
アナログ式メカナムホイール(RoverC)制御法
アナログ式メカナムホイールの制御方法について、勉強になります。

RoverCとM5StickCとM5StickVでグリッパロボットを作る
RoverCのセットアップから、プログラム「画像認識でPID制御→前進して掴む→旋回してQR(ゴール)を探す→ゴールに球を置く」までの解説記事です。
RoverCのJoyCを使った動かし方まとめ
まとめ
M5Stickで動かすロボット「RoverC-Pro」を紹介しました。





コメント